飒沓旨在提供有史以来最简单、最便捷和节省时间的智能修剪解决方案。
关注我们

飒沓旨在提供有史以来最简单、最便捷和节省时间的智能修剪解决方案。
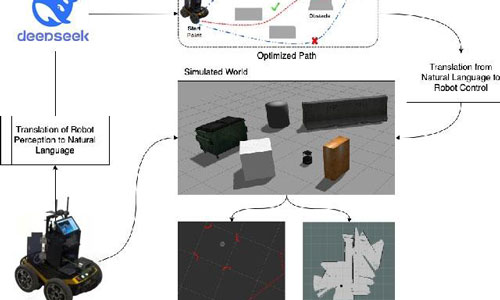
「我们做的不是实验室里的机器人,而是能在电站真正干活的系统。」 在长三角(汾湖)OPC 创新社区生态共筑活动现场,中国能源研究会、苏州市及吴江区相关部门、苏州大学、央国企能源集团及投资机构等嘉宾共同观摩了光伏电站实景展示区的运行演示。 现场,飒沓机器人创始人、苏州大学教授耿长兴站在展示区,看着屏幕上无人机与地面机器人协同完成巡检与作业联动。 数据在控制平台实时滚动,路径规划、目标识别、任务执行逐步闭环。这一幕,与过去十余年实验室研究形成鲜明对照——从算法模型到真实电站,从论文验证到工程运行。 飒沓机器人正是这一转变的产物。 飒沓机器人在现场完成具身智能系统级工程验证展示。 与此同时,飒沓机器人与苏州大学共建「新能源具身智能机器人研究院」,并完成天使轮融资签约,推动技术从实验室走向真实能源场景。 飒沓机器人由耿长兴团队发起,依托苏州大学科研体系孵化,是高校科技成果赋权改革背景下的创业实践。 团队长期深耕具身智能与机器人控制方向,研究覆盖多模态感知、运动控制、路径规划与多智能体协同等核心技术。 但与传统科研路径不同的是,这个团队选择了一条更「工程化」的路线:不再停留在单体算法或单机机器人,而是直接构建面向新能源运维的「空地一体具身智能作业系统」。 在这一系统中,无人机负责高空巡检与目标识别,地面机器人承担作业执行任务,通过统一调度平台完成任务分配与协同控制,形成完整作业闭环。 目前,该系统已在光伏电站及复杂地形环境中完成工程化验证,并进入应用推进阶段。 在新能源运维体系中,光伏电站长期存在人工巡检成本高、山地与高原环境作业难、作业风险高等问题。 这也成为飒沓机器人选择切入的关键场景。 在本次实景演示中,无人机完成高空巡检与目标识别,地面机器人执行地面作业任务,系统通过统一调度平台实现任务拆解与实时协同。 从巡检、识别到执行,整个流程在真实电站环境中连续完成,多设备之间形成动态协同关系。 这意味着,具身智能不再是单点能力展示,而是开始进入真实能源场站的系统级运行阶段。 在飒沓机器人创始人耿长兴看来,这个项目的关键变化不是「做出了机器人」,而是「做出了系统」。 这也解释了飒沓机器人与传统科研成果转化的不同之处: 过去的技术转化往往停留在单一算法或设备,而飒沓选择的是系统化路径——把感知、决策、控制与执行全部打通,形成可在真实环境运行的作业系统。 这一转变,使其直接进入新能源运维这一高复杂度场景,并在光伏电站完成系统级验证。 目前,该系统已完成多地工程验证,并逐步推进规模化应用。 同时,依托苏州大学科技成果转化体系,形成从研发、验证到产业化的衔接机制。 高校提供具身智能与机器人控制底层技术 企业负责系统工程化与场景落地 资本推动产品迭代与规模化应用 三者在新能源运维这一场景中逐步形成闭环。 从实验室算法到光伏电站实景验证,从单点技术突破到空地协同系统运行,苏州大学教授团队的这次创业,正在为具身智能落地提供一个新的样本。 这一过程的核心并不是「做出一台机器人」,而是让机器人系统真正进入产业现场并形成持续运行能力。 而这,或许正是下一阶段硬科技创业最重要的分水岭。从论文里的具身智能,到电站里的机器人系统
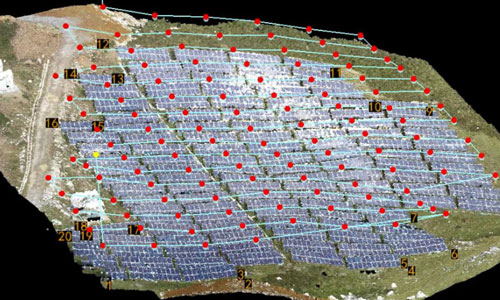
光伏电站成为第一现场:具身智能开始跑起来
教授创业背后:一条「科研 → 系统 → 产业」的路径
结语